A roundup of recent products in the GNSS and inertial positioning industry from the June 2021 issue of GPS World magazine.
OEM
Grandmaster Clock
Multi-constellation receiver

Photo: Microchip
The upgraded TimeProvider 4100 2.2 is now more redundant and resilient. It provides secure, precise timing and synchronization for critical infrastructure such as 5G wireless networks, smart grids, data centers, cable and transportation services. The 4100 2.2 introduces a software-redundancy architecture for flexible deployment, and supports a new GNSS multi-band, multi-constellation receiver to protect against time delay from space weather, solar events and other disruptions. The 4100 2.2 offers options for software and hardware support.
Microchip Technology, microchip.com
External Antennas
GNSS-ready multi-port models

Photo: Maxtena
The NETZ 5-in-1 multiple-input and multiple-output (MIMO) solution combines two LTE antennas and two Wi-Fi antennas with a GNSS antenna for high data throughput and streaming, video, industrial and internet of things (IoT) applications. It offers a low-profile design with integrated SubMiniature version A (SMA) connectors and is designed with rugged PC+ABS plastic black housing for demanding environmental challenges.
Maxtena, maxtena.com
Mini-PCLe Adapter
For industrial applications

Photo: Gateworks
The GW16143 is a high-precision GNSS/GPS Mini-PCLe adapter card that provides precise positioning to applications using Gateworks single-board computers. Based on the U-blox ZED-F9P, the GW16143’s multi-band real-time kinematic (RTK) technology enhances convergence times and performance. The module receives GPS, GLONASS, Galileo and BeiDou; supports L1 and L2/L5 bands; and provides GNSS positioning accuracy
of <2 cm.
Gateworks, gateworks.com
Inertial unit
Tactical grade for higher order integrated applications

The IMU-NAV-100. (Photo: Inertial Labs)
The IMU-NAV-100 is a fully integrated inertial solution that measures linear accelerations, angular rates, and pitch and roll with high accuracy utilizing three-axis high-grade micro-electro-mechanical systems (MEMS) accelerometers and three-axis tactical-grade MEMS gyroscopes. It features continuous built-in test, configurable communications protocols, electromagnetic interference protection, and flexible input power requirements that allow it to be easily integrated in a variety of higher order systems. The IMU-NAV-100-S offers high performance stabilization for line-of-sight systems, motion-control sensors, and platform orientation and stabilization systems. The IMU-NAV-100-A is for GPS-aided INS, AHRS and motion reference units.
Inertial Labs, inertiallabs.com
Mass Market Board
Single-board computer with up to three receivers

SimpleRTK2B-SBC. (Photo: ArduSimple)
The SimpleRTK2B single-board computer is built around up to three u-blox ZED-F9P high-precision GNSS receivers to simplify development of centimeter-level positioning solutions supporting real-time kinematics (RTK). It was developed to make RTK technology as close to plug-and-play as possible, and make the technology accessible to broader audiences. In addition to working as a stand-alone solution, customers can program their own applications with the company’s microPython API. The SimpleRTK2B-SBC delivers mechanical integration with centimeter position on three axes (heading, pitch, roll), outputting on NMEA, RTCM, RS232 and CANBus interfaces via Ethernet, Bluetooth, Wi-Fi and 2G/3G/4G communication.
Ardusimple, ardusimple.com
SURVEYING & MAPPING
Utility locator
Software with GNSS receiver enables mapping
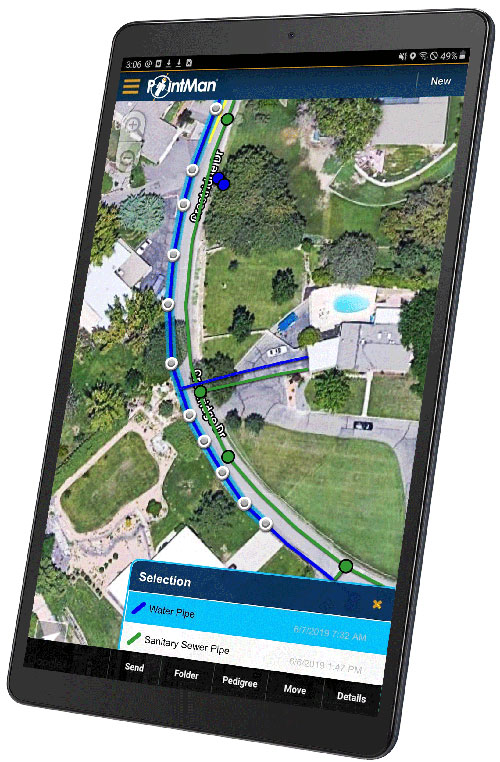
Photo: ProStar
PointMan software is now integrated into the Vivax Metrotech vLoc3 with a GNSS real-time kinematic (RTK) receiver to create a utility-locate device. Using the RTK-Pro internal cellular module with 4G LTE capabilities, the operator can connect to the NTRIP RTK caster that provides RTCM 3 corrections. With the integration of PointMan with the vLoc3 RTK-Pro, critical buried infrastructure can be captured, recorded and displayed at survey-grade without additional external equipment or post-processing. The integration provides centimeter accuracy of the precise location of buried utilities in real time. Data collected includes the type of utility, the depth of cover and the utility’s precise location.
ProStar Holdings, prostarcorp.com
GIS platform
Geospatial and location intelligence for smart cities
Screenshot: Hexagon Geospatial
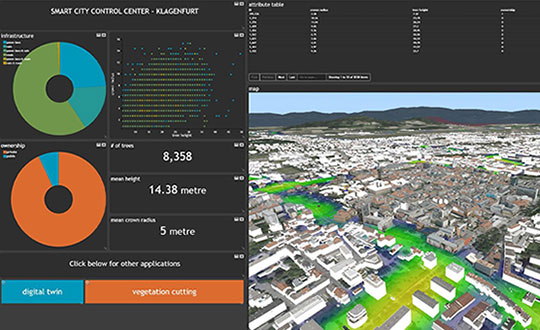
M.App Enterprise 2021 is a significant update to the platform for creating geospatial and location intelligence applications. The latest release features new browser-based 3D capabilities and enhanced visual effects, plus the ability to create and configure custom applications more easily. It allows users to access LuciadRIA’s 3D features with support for panoramic imagery, shading, ambient occlusion and other visualization effects to build browser-based solutions. It also features a new browser app configurator that makes it easier to create spatio-temporal dashboards, or Smart M.Apps. Feature Analyzer now allows users to add and manage multiple datasets on the fly and set up workflows.
Hexagon Geospatial, hexagongeospatial.com
TRANSPORTATION
Nearshore receiver
Measures positioning, heading, attitude, velocity and heave

Photo: Hexagon | NovAtel
The MarinePak7 marine-certified GNSS receiver is designed for nearshore applications. The multi-constellation, multi-frequency receiver was engineered to receive the Oceanix Correction Service from NovAtel, providing horizontal accuracy up to 3 cm (95%) in a marine environment. With SPAN GNSS+INS technology capabilities, the MarinePak7 couples GNSS and inertial measurement units (IMUs) for 3D positioning.
Hexagon | NovAtel, NovAtel.com
Expansion Card
For lane-level positioning

Photo: Antzertech
The ANNA-F9 high-precision GNSS Mini-PCIe card can achieve centimeter-level accuracy. It integrates the U-blox ZED-F9 receiver platform, providing multi-band GNSS (GPS, GLONASS, BeiDou, Galileo, QZSS and SBAS) and RTK positioning, and can be integrated with embedded systems. It provides high-accuracy positioning for applications including lane-level navigation and railway transportation. The ANNA-F9 series supports RTCM formatted corrections and centimeter-level positioning from local base stations or virtual reference stations in a network RTK setup.
Antzertech, antzer-tech.com
Marine Antennas
Two added to VeroStar line

Photo: Tallysman
Marine vessels often host both Iridium (1616–1626.5 MHz) and Inmarsat (uplink: 1626.5–1660.5 MHz) satellite communication antennas that transmit and receive signals. The VSP6037L-MAR and VSP6337L-MAR VeroStar marine antennas strongly attenuate interference from both signal sources, providing 75 dB to 85 dB of attenuation over Iridium and 85 dB to 95 dB over Inmarsat uplink, enabling clean GNSS signal reception and precise positioning. The VSP6037L-MAR supports the full GNSS spectrum; the VSP6337L-MAR supports GPS/QZSS-L1/L2/L5, GLONASS-G1/G2/G3, Galileo-E1/E5a/E5b, BeiDou-B1/B2/B2a, and NavIC-L5 signals. Both antennas support L-band correction signals. Every VeroStar antenna features a robust pre-filter and a high-IP3 LNA architecture, minimizing desensing from high-level out-of-band signals, including 700 MHz LTE, while still providing a noise figure of 1.8 dB. They meet IEC 60945 and IEC 61108 marine certifications for challenging marine environments.
Tallysman Wireless, tallysman.com
Cargo Service
For tracking high-value assets
The managed internet of things (IoT) Acculink Cargo can track the location and condition of high-value and sensitive assets, providing real-time visibility, product-level tracking and exception-based monitoring as goods move through their supply chains. Tracking can be used to avoid delays, minimize dwell time, prevent theft and remediate environmental conditions that can cause asset damage.
Sierra Wireless, sierrawireless.com
Tracking Antenna
Rugged external mount

Photo: Laird Connectivity
The GNS1559MPF or Mini GNSS is a rugged, high-performance and cost-effective solution for most GNSS or asset-tracking applications. The small form factor makes it easy to install on or in vehicles or buildings. It is IP67 rated to withstand impact as well as water and dust intrusion in demanding environments and operating conditions. The antenna can be configured with different cable types in varying lengths and with various connector types. Uses include public safety, in-building, fleet management, asset tracking, vehicle and personnel tracking.
Laird Connectivity, lairdconnect.com
UAV
Long-Flight UAS
Unmanned system for long-distance flights

Photo: Zala Aero Group
The Zala 421-16E5G long-flight UAS is a domestic unmanned aerial system with a hybrid power plant. The non-aerodrome-based system is capable of providing aerial monitoring covering distances of more than 150 kilometers and staying in the air for more than 12 hours. Its power plant charges a buffer battery for an hour, allowing the UAV to fly long distances. It is equipped with two thermal imagers and a 60x video camera. Alternatively, it can carry a payload of up to 10 kg.
Zala Aero Group, zala-aero.com/en/
Inertial navigation system
Ready for drone surveys

Photo: OxTS
The xNAV650 inertial navigation system (INS) provides surveyors with absolute position, timing and inertial measurements (heading and pitch/roll) that they can integrate into their projects. When combined with data from other devices (such as lidar sensors and cameras), the INS measurements can greatly enhance the surveying process. The xNAV650 has the latest micro-electro-mechanical (MEMS) inertial measurement unit (IMU) technology and survey-grade GNSS receivers. At 77 x 63 x 24 mm and 130 grams, it is suitable for a wide range of UAV data-collection applications: surveys of bridges, buildings, forests and rail; coastal monitoring; map creation; and pipeline exploration. Data collected can be fused with data from almost any lidar sensor. OxTS NAVsuite software is included with all OxTS INS. Other optional software is available, including precision time protocol and GX/IX tight-coupling technology.
Oxford Technical Solutions, oxts.com
Lidar System
With GNSS receiver and IMU

Photo: CHCNAV
The AlphaAir 450 (AA450) lidar system is a lightweight, compact all-in-one sensor. Featuring an inertial measurement unit (IMU), GNSS receiver and 3D scanner and camera, the AlphaAir 450 is suitable for power-line inspections, topographic mapping, emergency response, agricultural work and forestry surveys. The unit can be rapidly deployed in the field to collect geospatial data. It achieves absolute accuracy of 5 cm (vertical) and 10 cm (horizontal) for small survey areas. Adjustment algorithms applied in CHCNAV CoPre software further improve precision and accuracy. The AA450 weighs 1 kilogram for easy mounting on a UAV. It is IP64 rated against dust and water spray and operates at –20° C to +50° C.
CHC Navigation, chcnav.com
Imaging systems
Survey-grade with lidar

Photo: Geocue
The True View 635/640 3DIS is GeoCue’s second-generation lidar/camera-fusion platform designed to generate high-accuracy 3D colorized lidar point clouds using the Riegl miniVUX-3UAV. All 3DIS platforms include GeoCue’s data-processing software suite True View EVO, which integrates with the Applanix POSPac. With its 120° fused field of view, the True View 635/640 provides 3D mapping with excellent vegetation penetration and wire detection in a payload package of 3.2–3.6 kg. True View EVO supports the direct creation of ground classified point clouds, surface models, contours, digital elevation models, volumetric analysis, wire extraction and similar products, without the need for additional third-party software.
GeoCue Group, geocue.com
Gilla detta:
Gilla Laddar in …