
The realistic racetrack in the Assetto Corsa game. (Screenshot: Dronezone)
News from OxTS
The possible applications for 3D point clouds are almost endless. When you think of lidar, the mind naturally wanders to applications of the autonomous vehicle navigation or geospatial survey type. In fact, navigation and lidar data are useful for all manner of applications—including video game development.
When a new technology, such as lidar, is first brought to market, a number of factors affect its price. Initially, the cost-per-unit is likely to be high to ensure recovery of research and development costs. However, as technology ages and manufacturers innovate and bring out new versions, price invariably comes down.
As this process occurs, it puts the technology into the hands of a much wider audience, increasing the number of new and innovative use cases.
Point clouds are useful for many wide and varied applications. Autonomous vehicle developers may use point clouds to aid object detection and avoidance, while geospatial surveyors could use a point cloud to determine road degradation over time or monitor the rate of coastal erosion.
These are however some of the more common use cases. But how can navigation data be used in applications such as video game development? Let’s first look at how navigation data works alongside lidar.
Lidar and Inertial Navigation
To create a 3D point cloud, users must combine the position, navigation and timing measurements from an inertial navigation system (INS) with raw lidar data. Without accurate INS data, it is impossible to create a point cloud. This is because the lidar sensor needs to know its position in space and time and its orientation.
To avoid complicated software engineering work, simple-to-use software such as OxTS Georeferencer is available to georeference the lidar data. Once georeferencing is complete, OxTS Georeferencer will create a PCAP file that users can view in many point cloud viewer software applications.
Enter Dronezone
As lidar technology becomes more accessible, new and inventive ways to use point clouds are coming to light. OxTS partner Dronezone is one such company finding new uses for lidar.
Dronezone builds and hires out professional unmanned aerial vehicles (UAVs). They build UAV payloads with Velodyne VLP-16 lidar sensors and OxTS INS devices they sell or rent to customers.

Cover: Kunos Simulazioni
Dronezone’s customers have used the payloads for a variety of projects. One used a payload to scan an aging railway bridge looking for possible weaknesses and deterioration over time. Besides geospatial mapping projects, Dronezone is seeing an increasing need to cater to niche applications.
Dronezone undertook surveying the Transylvania Motor Ring racetrack for a video-game developer Kunos Simulazioni, which publishes racing simulator “Assetto Corsa.” The company wanted an accurate digital representation of the track contours. The results, which you can see in the video and screenshots, are particularly impressive.
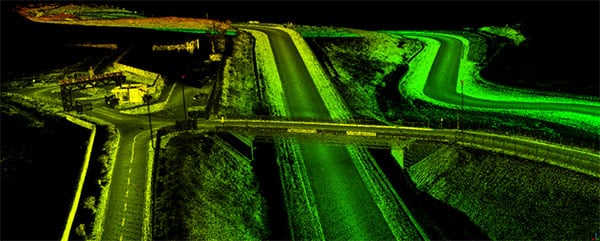
Point cloud of the Transylvania Motor Ring. (Image: Dronezone)
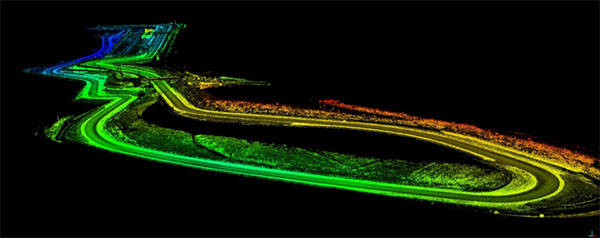
Point cloud of the Transylvania Motor Ring. (Image: Dronezone)
Racing Simulator
For this project, Dronezone moved away from traditional UAV-based mapping. To survey the track precisely, the company used the flexibility of its UAV payload by repurposing the hardware for use on a car. With many off-the-shelf solutions, this wouldn’t have been possible. The setup enabled Dronezone to complete multiple laps of the track and create a high-density point cloud.
“Using different components to build a UAV payload meant that Dronezone could reuse the hardware and build a different setup suitable for use on a car,” said Paris Austin, head of new product technology, OxTS. “It’s this flexibility that allows Dronezone to serve multiple applications.”
To further improve results, Dronezone used the Boresight Calibration feature within OxTS Georeferencer to calibrate the coordinate frames of the lidar sensor and INS. This process, which involves a short survey of two retro-reflective targets, increases the clarity of the final results and eliminates blurring and double vision.

The OxTS INS and lidar payload on an auto for racetrack mapping. (Photo: Dronezone)
The quality of the data produced has given Dronezone confidence it can win more business from the same customer to map further tracks for the game.
This is just one example of the new and unique applications we’re developing alongside our customers.
The original article appears on the OxTS website.