GNSS and inertial navigation sensors are meeting the challenges of extreme conditions, from freezing Arctic ice to the edges of steaming volcanoes, from high-speed aircraft over cities to the subways under them. Even beyond, into deep space.
IN THE ARCTIC
Wave Buoys Help Study Arctic Climate Change
Where the edge of Arctic ice transitions to open water, towering seas are smashing sea ice into melting pieces, with far-flung effects on climate and nature. Over recent decades, the Arctic has warmed more than any other region, leading to a significant reduction in sea ice volume. The combination of increased ice-free area and more mobile ice cover has led to the emergence of a seasonal marginal ice zone (MIZ) in the Beaufort Sea, north of Prudhoe Bay, Alaska.
The United States Office of Naval Research conducted a five-year study of the MIZ, which included intense field work in the freezing Arctic sea. Here, the ice is vulnerable to ocean surface waves that form in the open water, resulting from strong winds and frequent storms. Also studied were in-ice waves, where ice and water clash. The goal was to understand how both factors impact the ice floe melting.

Autonomous ocean flux buoys integrate SBG Systems’ miniature inertial sensors. (Photo: SBG Systems)
The MIZ lies in the subarctic seas in winter and transitions into the interior of the Arctic Basin in summer. To investigate the MIZ’s dynamics, ONR engaged an international program of observations and simulations using several autonomous systems, including wave buoys. The wave buoys — officially designated the autonomous ocean flux buoys — integrate SBG Systems’ miniature inertial sensors.
The MIZ study comprised an international team of scientists from more than a dozen organizations.
Buoys for All Seasons. The program included 20 buoys deployed in the summer, and five in the winter, to quantify open ocean and in-ice wave characteristics and evolution. “We needed a very rapid and cost-effective solution to measuring directional wave spectra in the ocean,” said Martin Doble, oceanographer at the French UPMC School and member of the research program. “Time to deployment was very short, so an integrated solution, giving us good heave numbers straight out of the box, was essential. Delivery time of the units was also critical.”
Drilled into the ice, the summer buoys were powered with solar panels and equipped with SBG Systems’ IG-500A miniature attitude and heading reference system to detect both distant and near-wave effects on the local ice floe. Once the ice melted, the summer buoys continued to measure open ocean characteristics.
Five winter buoys were installed on the ice. These buoys were made of aluminum for better resistance and contained enough battery power to keep them going through the dark winter months. Every buoy also contained processing and control electronics, an SD card, a GPS receiver and an Iridium satellite modem and antennas to transmit the recorded data to its base station. Both summer and winter data from the buoys were used to quantify the wave attenuation rate.

Winter buoy installed on an ice floe. (Photo: SBG Systems)
By measuring the waves and ice, the buoys help scientists understand how waves are approaching and breaking up the sea ice. When winter approaches and ice begins to refreeze, the buoys help show how the waves interact with the ice as the temperatures change.
Calibration. The IG-500A inertial sensors were used for wave height and direction. IG-500A measures in real time the roll, pitch, heading (accurate to 0.35°) and heave (accurate to 10 centimeters). Every sensor is calibrated for bias, linearity, gain, misalignment, cross-axis and gyro-g from –40° to +85°C. The calibration is key to enabling the sensors to provide reliable data in the harsh environment.
Doble said the units were reliable, with no failures in the harsh Arctic conditions. They ran continuously for more than a year without requiring power cycling, and “the numbers look good, giving clear results.”
The data is helping researchers understand the physics that control sea ice breakup and melt in and around the ice edge. “We have this amazing picture of the ocean, atmosphere, and ice going from the fully frozen period in March to meltdown and breakup right through to freeze-up,” said Craig Lee of the University of Washington’s Applied Physics Laboratory.
The IG-500A sensors also delivered heave measurement, important for instrumented ocean buoys. During the project, SBG Systems released the Ellipse Series, and the new line replaced the IG-500 series. More accurate in attitude and more reliable (with an IP68 rating) for the same budget, the new miniature inertial sensors now provide a heave measurement that automatically adjusts to the wave period, resulting in higher performance.
Clear differences were measured between surface wave activity outside of the ice, and then moving into the ice, with huge attenuation as the waves enter the ice and die back quickly.
Current Arctic Program. Following the close of the MIZ project in 2015, the ONR launched a new project for 2016–2020, the Stratified Ocean Dynamics in the Arctic (SODA). SODA is also taking place in the Beaufort Sea, and is using the autonomous ocean flux buoys. The buoys are now equipped with SBG’s Ellipse-A sensors.
Why the Arctic Matters
“There’s no question that the Arctic sea ice extent is decreasing,” said Martin Jeffries, program officer for the ONR Arctic and Global Prediction Program. “Multiple sources of data — autonomous underwater gliders, ice-measuring buoys and satellite images of the marginal ice zone — were used to help understand why the ice is retreating.”
The implications for the U.S. Navy, and the world, are significant. If there were no sea ice in the Arctic at the end of summer, that would mean that the Arctic Ocean would, until the winter ice came in, be completely open — something unprecedented in living memory, Jeffries noted.
Naval leaders have made it clear that understanding a changing Arctic is essential for the Navy to be prepared to respond effectively to future needs.
“[T]he opening of the Arctic Ocean has important national security implications as well as significant impacts on the U.S. Navy’s required future capabilities,” said then Chief of Naval Operations Admiral Jonathan Greenert, in his introduction to the U.S. Navy Arctic Roadmap, 2014–2030, published in 2014. “The United States has a history of maritime homeland security and homeland defense concerns in the Arctic Region […] .”
In the period between 2007 and 2014, satellites recorded the eight lowest sea ice levels ever. A key goal of the MIZ and SODA programs is to use the new data collected to make better predictive computer models — ensuring safer operations for not only naval vessels, but also anticipated increased sea traffic by shipping and fishing industries; oil, gas and mining companies; and tourism operations.
Much of the data coming in to Arctic scientists is now from improved sensors, with greater ability to survive the harsh weather and ocean conditions.
Inside the Ellipse
Alexis Guinamard, chief technology officer of SBG Systems, described to GPS World the company’s most advanced sensor for extreme environments.
“Of course we have more precise sensors like Ekinox, Apogee or even Horizon, for ‘extreme’ precision. But for extreme environments, the more appropriate sensor line is the Ellipse series,” Guinamard said. “There are several key parameters that make them better for this kind of environment.”
Those features include a high-temperature calibration range, from –40°C to +85°C, which enables the sensors to operate at the same performance level in the most extreme temperature environments.
“While typical entry-level or industrial-grade sensors only provide a room temperature or basic temperature calibration, we have developed a calibration procedure used for both survey-grade and industrial-grade sensors using a precision two-axis rotary table with temperature chamber,” Guinamard said. “An advanced thermal modeling minimizes the calibration error over the full temperature range.”

Ellipse-D dual-antenna mini INS/GNSS. (Photo: SBG Systems)
The sensors work in highly dynamic and vibrating environments because their gyros operate well, changing position up to 900° per second. Similarly, their accelerometers can reach up to 40 g, with excellent behavior in vibrating environments. “We can typically install our sensors directly on the chassis of the vehicle, while lower grade sensors may require specific dampers that are complex to design and make it difficult to precisely align the sensor,” Guinamard said.
A GNSS interference-mitigation capability enables the sensors to perform in challenging GNSS environments.
With the Ellipse-D, high latitude operation is possible because it provides a dual-antenna heading that is insensitive to higher latitudes, Guinamard explained.
Saltwater-Proof. SBG Systems sensors typically have waterproof (IP68) enclosures that can deal with harsh conditions and sustain exposure to saltwater for a limited period of time. For long exposure to salt water, the company offers specific titanium enclosures. For instance, its Navsight series has a saltwater-proof inertial measurement unit.

Navsight marine solution. (Photo: SBG Systems)
The Navsight Marine Solution is a motion and navigation solution for hydrographers available as a motion reference unit (MRU), as an inertial navigation solution (INS) with embedded GNSS, and as an INS using a third-party GNSS receiver.
Navsight can be outfitted for demanding shallow- or deep-water environments to survey highly dense areas (bridges and buildings), as well as applications where only a single antenna can be used.
With the addition of the Horizon inertial measurement unit (IMU) to the Navsight line in January, which joined the Ekinox and Apogee IMUs, the line is suitable for large hydrographic vessels surveying harsh environments. The Horizon IMU is based on a closed-loop fiber-optic gyro (FOG) technology that enables ultra-low bias and noise levels, allowing robust and consistent performance.

Dust, noxious gas and loose rock near the summit makes volcanic surveying especially challenging. (Photo: Trimble)
AT VOLCANO’S EDGE
GNSS Tracks Magma on Mount Etna
Scientists seeking to better understand volcanoes are using GNSS to investigate one of the most active in the world.
Mount Etna, in eastern Sicily, Italy, has been erupting for hundreds of thousands of years. The constant activity makes it a popular tourist attraction — smoke often billows from the mountain and fiery lava spews down its sides.
Researchers flock to Mount Etna, too, to study the movement of magma — the hot fluid beneath the Earth’s surface from which rocks are formed when cooled.
To measure the vertical gradients of gravity on Mount Etna’s slopes and summit craters, geophysicists from Slovakia and Italy teamed up on a field campaign during which they used high-accuracy GNSS positioning with emphasis on accurate height measurements to collect gravimetry and topographic information.
The extreme environment and spotty cellular coverage on Mount Etna made using GNSS with real-time kinematic (RTK) or virtual reference station (VRS) a challenge. The geophysicists used the Trimble CenterPoint RTX correction service and Trimble R10 GNSS receivers to ensure reliable GNSS performance.
“On many points, especially the higher part of the volcano, Internet signals were poor or [there were] none at all,” said Juraj Papčo, a geodesist with the Earth Science Institute of the Slovak Academy of Sciences. “Only by using RTX were we able to collect real-time data. It performed well in higher elevations and difficult conditions.”
The project teams also used Trimble RTX to navigate to locations where they needed measurements. At each station, they collected static and real-time positions and later compared post-processed results with the real-time positions.
Dust, noxious gas and loose rock made approaching the summit especially challenging. Trimble RTX helped the Slovak-Italian team of geophysicists better understand volcanoes and anticipate volcanic events.

Researchers used high-accuracy GNSS positioning to collect gravimetry and topographic information. (Photo: Trimble)

Prisms affixed to the track enable measurement of change and structural movement. (Photo: Topcon)
UNDER A METROPOLIS
Harsh Construction Environment Monitored
Deep beneath Paris, work is underway to expand the Metro, the city’s rapid transit system. The Grand Paris Express project encompasses a 200-kilometer-long network of railway lines — mostly underground — that will link the suburbs to the city.
The contractor responsible for monitoring construction of the first stage of the project’s infrastructure, Cementys, is using more than 100 instruments from Topcon’s MS series of robotic total stations because they can withstand the harsh construction environment.
Monitoring structural movement across the network is critical; the goal is to protect the surrounding Parisian structures and the people who live and work in them. Use of the monitors also ensures that the expensive equipment used on the project is not stolen.
Topcon’s MS Series robotic total stations continuously measure the angles and distances of prisms fixed to structures. As a result, site engineers know immediately when measurement change and structural movement occurs. The technology also includes Matrix Detection software to help increase the measurement system’s speed and accuracy. The company’s TSshield integrated security software, standard on all its total stations, provides remote locking and location positioning data to within 100 meters, depending on GPS and cellular coverage.
“We have been able to integrate this open technology perfectly into our global data management system, which also includes optical fibers sensors, vibrating wire sensors, and others,” said Cementys CEO Vincent Lamour.
Construction of the Grand Paris Express project is taking places in stages and is expected to be complete in 2030.

Photo:Position tracks from two laps of the race show that when the plane inverts and starts to track the reflected signal, the VN-300 GNSS/INS (blue trace) reverts to free inertial navigation and propagates the position based on inertial data. The trace follows a smooth trajectory through the next air gate until the GNSS data converges with the INS position. (Image: Google Earth with VectorNav Data)
ABOVE THE SEA
Flying High with Augmented Reality
The 2018 Red Bull Air Race World Championship in Cannes, France, made it easier for fans to follow along. Though pilots race one at a time, the new “Ghost Plane” augmented reality imagery provided fans with a real-time representation of each pilot’s flight, which challenges their speed, precision and skill maneuvering lightweight racing planes.
The Ghost Plane is driven by onboard telemetry data gathered during flight. For a pilot’s run to be accurately represented, the onboard telemetry system has to track position, velocity and attitude (yaw, pitch and roll) through high-dynamic maneuvers and in challenging environmental conditions.
While every Red Bull Air Race track layout is different, they all include a difficult vertical turning maneuver (VTM), where pilots pass through a gate and turn 180 degrees to reverse course quickly without exceeding the g limit.
Each plane is fitted with several GNSS receivers to track the plane, but dynamic maneuvers made during the race rapidly changes which satellites the GNSS receiver can track, which typically results in a loss of position fix.
To further increase the challenge for the telemetry systems, races are commonly held over water, which can reflect GNSS signals and create significant multipath errors at low altitudes. During the VTM, the plane can experience 300°/second angular rates and 12-g accelerations, during which GNSS tracking is typically lost because the antennas no longer point to the sky.
To make the Ghost Planes possible, a VectorNav VN-300 dual-antenna GNSS/INS (inertial navigation system) couples gyroscope and accelerometer data to propagate position and velocity estimates during loss of GNSS measurements through maneuvers such as the VTM.
The VN-300 combines two GNSS receivers with a 9-axis inertial measurement unit (IMU). It couples acceleration and angular rates from the IMU with position and velocity data from the receiver using a quaternion based Extended Kalman Filter (EKF). VectorNav algorithms work in conjunction with the state estimation filter, making the VN-300 more robust and intelligent, and enabling it to reject poor GNSS data and perform accurately in high-dynamic maneuvers and challenging operating conditions.
NEW EQUIPMENT
Antenna Designed for Challenging Environments
CHC Navigation’s latest GNSS antenna is an example of a product designed specifically for harsh environments.

AT311T antenna. (Photo: CHC Navigation)
The heavy-duty CHCNAV AT311T is designed for demanding applications subject to shocks and vibrations. With advanced filtering and robust signal tracking, it provides survey-grade GNSS signals to enhance position reliability for marine applications, machine control, precision agriculture and industrial automation.
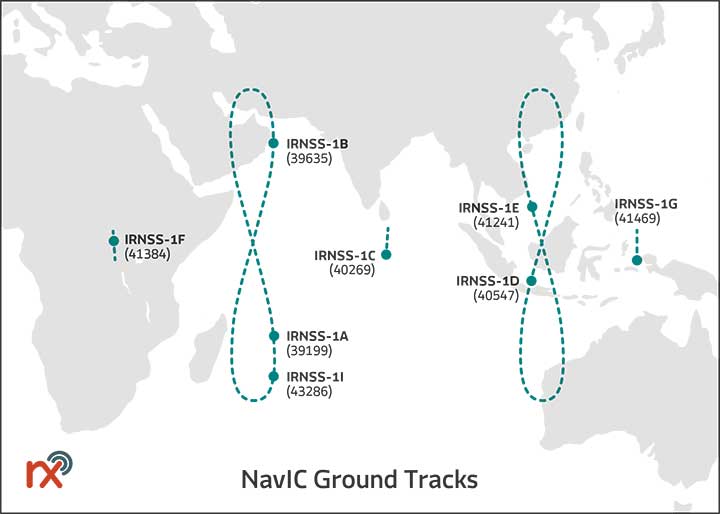
Features include multi-constellation GNSS tracking using GPS, GLONASS, BeiDou, Galileo, QZSS, IRNSS and SBAS. Its IP68 water-resistant design makes it safe to use in extreme conditions with a wide temperature range (–40°C to +85°C). Its internal stacked structure enhances performance in high-interference environments, and the 40-dB signal gains, advanced signal filtering and multipath rejection design provide superior and robust GNSS signal tracking in challenging surroundings.
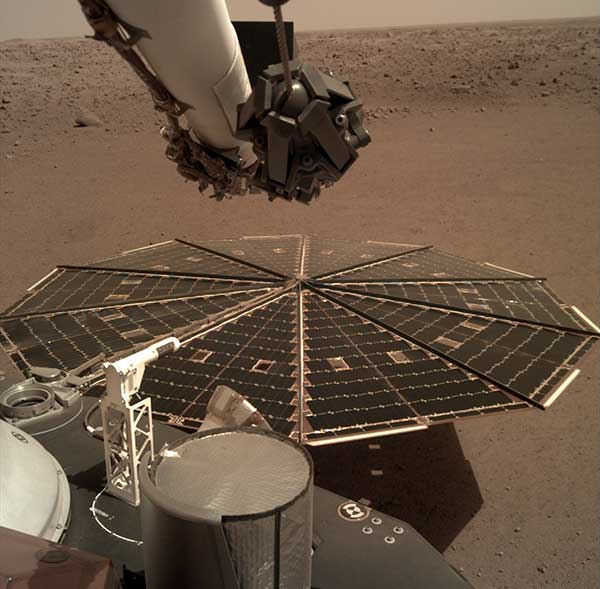
One of the two solar arrays on the InSight lander dominates this view of the plain of Elysium Planum, taken Dec. 4, 2018. (Image: NASA/JPL-Caltech)
IN OUTER SPACE
Exploring Beyond Earth
While GNSS isn’t useful on the surface of Mars, inertial navigation is a key technology for exploration of the red planet. For instance, the Northrop Grumman LN-200S sensor guided the Mars Opportunity rover, which explored Mars for 15 years until a storm struck in June 2018.
The LN 200S sensed acceleration and angular motion, with its data output used by the rover’s control systems for guidance.
The hermetically sealed unit, suitable for planetary and asteroid probes, helped position the rover’s antennae to relay photos and data to satellites. Opportunity beamed back 187,000 raw images, according to NASA.
Because IMUs don’t depend on satellites, they work well for deep space missions, Honeywell explained in a press release.
In November 2018, NASA’s InSight spacecraft landed on Mars to study the interior with a heat probe and listen for marsquakes with a seismometer. Aboard was Honeywell’s Miniature Inertial Measurement Unit (MIMU), an IMU that has been a part of Lockheed Martin’s Mars satellites and landers since 1998.
The MIMU is a three-axis strapdown device specifically designed for the satellite and deep-space-probe market (more than 500 MIMUs have been deployed throughout the solar system). It uses ring laser gyros to help control and stabilize a spacecraft during entry, descent and landing, as well as maintain orbit and payload orientation. The radiation-hardened design supports 15-year missions.
Gilla detta:
Gilla Laddar in …