Image: gorodenkoff iStock/Getty / Images Plus/Getty Images
Autonomous vehicles are a truly fascinating innovation. Most modern vehicles on roadways around the world have some level of autonomy, ranging from Level 1 features such as cruise control to Level 5 fully autonomous features such as the ability to monitor roadway conditions and perform safety-critical tasks without intervention by a human driver.
Even though autonomous vehicles have been continually developed and tested for years, adoption has been minimal. According to the University of Michigan Center for Sustainable Systems, a majority of researchers, manufacturers and experts predict widespread adoption of Level 5 autonomous vehicles by 2030 or later.
Several barriers have delayed the adoption of autonomous vehicles, such as concerns about safety, data security and cyberattacks; lack of consumer demand; liability laws and lack of regulatory legislation; and doubts as to their economic viability.
While their adoption is slow, autonomous vehicles have been widely praised for the range of benefits they would provide. According to the U.S. National Highway Traffic Safety Administration, they include: much greater road safety due to features such as advanced driver assistance systems, lidar, cameras, inertial navigation systems and more; greater independence for people with disabilities, senior citizens and low-income individuals; reduced road congestion due to the lower number of crashes and an increase in ride-sharing; and environmental benefits as the automotive industry transitions to all-electric vehicles.
Several technology and automotive companies also have seen the potential benefits of autonomous vehicles for many applications and the potential impact they could have on communities worldwide. In response, these companies have supported autonomous vehicle innovation and adoption by offering new products and working closely with educators, nonprofit organizations and other groups who aim to leverage it to connect the world.
Education meets automated racing
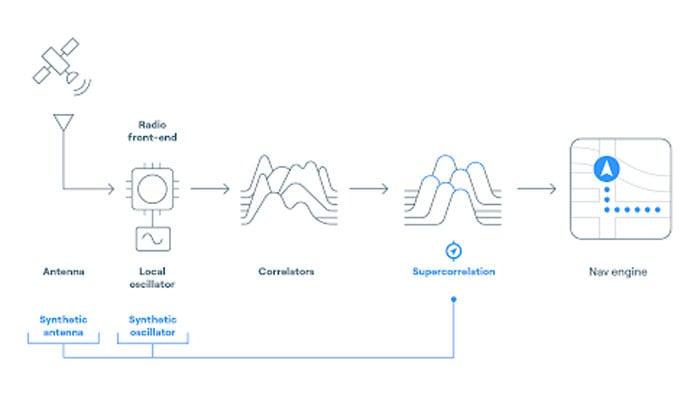
Safran Electronics & Defense, which specializes in resilient positioning, navigation and timing (PNT) solutions, has advanced the adoption of autonomous vehicles with its simulation software while simultaneously supporting current students in their academic pursuits.
To jointly develop future PNT technology and solutions Safran’s Minerva Academic Partnership Program supports partnerships with the academic community by providing its technology for student-led research projects that use GNSS signals. Leisa Butler, the program’s chair, elaborated on its mission: “Collaborating with our customers in academia while advancing PNT education is the program’s core purpose. We provide members with access to our powerful Skydel GNSS simulation engine.”

Safran and auburn university students are pictured with their autonomous F1 race car that competed in the Indy Autonomous Challenge on the Las Vegas Motor Speedway at CES 2023. Auburn students used Skydel, a Safran simulation engine, to improve the capabilities of the car and to learn how to make it safe and reliable on the track. (Image: Safran Electronics & Defense)
As a part of the program, Safran has a long-established partnership with Auburn University’s College of Engineering. Safran and Auburn University students participated in the Indy Autonomous Challenge, which took place on January 7, at the Las Vegas Motor Speedway during the 2023 Consumer Electronics Show. Nine autonomous Formula 1 race cars, representing colleges and universities from around the world, took part in a head-to-head driverless racing competition with some vehicles reaching speeds of more than 190 mph.
Safran has supported Auburn students before, during, and after this challenge by enabling them to leverage its GNSS simulators, such as Skydel and the GSG-8, which are used in the university’s autonomous vehicle lab. Butler said that giving students access to the simulation software prior to the high-speed races helped them troubleshoot and test the vehicles and improve the results.
“Resolving issues in the lab improves safety while saving time and money,” Butler stated. “The Indy car features multiple antennas. Since Skydel can support multiple instances simultaneously, the team can test heading and realistic scenarios in a simulated environment. This is before they race next to other vehicles at high speeds.
Safran also supports the general advancement of autonomous vehicle technology. Positioning and navigating autonomous vehicles involves the use of multiple technologies, including GNSS.
“Skydel is a valuable tool for the autonomous vehicle industry that wants realistic lab testing because it can support multiple, independent trajectories or antenna outputs simultaneously,” Butler said. She also pointed to the importance of developing mitigation techniques against jamming and spoofing.
“Using a simulator with the Skydel engine allows the user to test in all sorts of challenging environments before putting the wheels on the pavement. This lets the user make sure the vehicle is ready for real-world navigation and avoid costly mistakes. It also gives them a chance to practice and develop countermeasures against unintentional interference and malicious actors.”
Butler added that Safran is proud to support students who are helping to develop automated technology.
“Supporting Auburn’s Autonomous Vehicle team is an honor and a privilege. Student research represents the future of our industry,” Butler said. “We are proud to support them and see what they can accomplish with our simulation tools. We are confident that they will be able to gain valuable insights that will help them design, build and test their autonomous vehicles. It is our hope that their hard work will lead to the development of safe, efficient and affordable autonomous vehicles in the future.”
Accelerating mobility
Waymo, based in Mountain View, California, is an autonomous driving technology company. Formerly known as the Google self-driving car project, it was founded in 2009 and aimed to drive more than 10 uninterrupted 100-mile routes autonomously.
Its first fully autonomous ride on public roads took place in 2015, then Waymo became an independent self-driving technology company in 2016. It launched its first public trial of autonomous ride-hailing vehicles, called Waymo One, in Phoenix, Arizona in 2017, and has expanded its completely autonomous ride-hailing service trials to Scottsdale, Arizona, as well as San Francisco and Los Angeles.
The Waymo vehicle fleet also became fully electric this year.

360° Lidar, Radar, and cameras make up most of the technical elements of the fifth-generation Waymo fully autonomous vehicles. They also have redundant steering and braking, backup power systems, redundant inertial measurement systems for positioning, and more. (Image: Waymo)
Driving Change
According to its website, Waymo “represent[s] a diverse set of communities and interests, and we are coming together because we all share the belief that autonomous driving cars can save lives, improve independence, and create new mobility options.”
Some of Waymo’s community partners include Bike MS, the Arizona Council of the Blind, the Foundation for Senior Living, and Mothers Against Drunk Driving.
One community story to note is Waymo’s partnership with First Pace AZ — a supportive housing community for adults with autism, Down syndrome and other types of neurodiversity — to explore how Waymo could aid neurodiverse people.
Eli is a resident of First Place AZ and an adult with neurodiversity. He does not drive and relies heavily on ride-hailing services, carpooling, and the train to get to work and to volunteer. Not all public transportation is always available or accessible at certain hours. Additionally, human-driven rideshare and carpooling services can present bias from drivers and other passengers who do not understand the behavioral nuances of people who are neurodiverse.
To test the autonomous ride-hail Waymo One system, Eli and Natasha Grant, director of workplace and community inclusion at First Place AZ, hailed a ride to a local animal shelter.
After using the Waymo One service, Eli believed Waymo’s technology could help him stay connected to his community, wherever he may live in the future. Grant added that autonomous vehicles provide independence for individuals who may otherwise not be able to go to places to which they want and need to go.
Breaking social barriers

Community partners that fight food insecurity use Cruise’s autonomous vehicles to pick up left over food from businesses. (Image: Cruise)
Cruise is a self-driving car company based in San Francisco, California, and offers driverless rides in San Francisco; Austin, Texas; and Phoenix, Arizona. It was founded in 2013 by Kyle Vogt and acquired by General Motors in 2016.
Cruise first offered driverless ride-share services for its employees in 2017. In early 2020, the company began testing those driverless rides on public roads in San Francisco. Later that year, Cruise switched gears and repurposed a portion of its all-electric autonomous vehicle fleet to deliver meals to the community during the COVID-19 pandemic. It also began self-driving delivery trials in Arizona.
In 2021, Cruise announced plans for international driverless testing and expansion in Dubai and Japan. The next year, it opened its fully driverless service to public riders in San Francisco.
Delivering Hope
Cruise works with several community partners, such as the National Federation of the Blind, the SF-Marin Food Bank, and the San Francisco Giants.
“At Cruise, our commitment to social impact is a vital part of our business and an extension of our mission to improve life in our cities, especially for people underserved by transportation today,” the Cruise website stated.
In June, Cruise partnered with Replate — a nonprofit food rescue platform — to fight food insecurity and food waste in San Francisco and other communities. The partnership aims to use Cruise’s all-electric autonomous vehicle fleet, integrated with a national network of food recovery partnership from Replate, to pick up leftover food from local businesses and deliver it to organizations that help fight food insecurity.
The goal of the partnership is to create a sustainable cycle of food rescue that fights hunger and waste in local communities.
Gilla detta:
Gilla Laddar in …