A roundup of recent products in the GNSS and inertial positioning industry from the May 2020 issue of GPS World magazine.
SURVEYING & MAPPING
RTK thermal mapper
Asphalt paving with RTK positioning

Photo: Topcon
The Thermal Mapper is designed to monitor temperature segregation to prevent future problems and measure performance, as well as provide accurate compliance reporting, using real-time kinematic (RTK) positioning accuracy. It records temperature readings behind an asphalt paver during paving and provides a visualization to operators in real time of whether the mix falls within a predefined temperature range. If the readings are unacceptable, operators can make adjustments. The system also creates data reporting files to download for applications such as U.S. Department of Energy compliance through the interactive Pavelink module, the Topcon cloud-based logistics application for asphalt paving.
Topcon Positioning Group, topconpositioning.com
Unmanned fleet
Aids near-shore projects

Z-Boat 1800-T Trimble Edition fleet. (Photo: Trimble)
The Z-Boat 1800-T unmanned survey vessel is equipped with Trimble’s high-precision GNSS heading receiver and compatible with Trimble Marine Construction (TMC) software. The Z-Boat 1800-T enables marine construction and dredging projects to run efficiently and be monitored in real time anywhere in the world. The Z-Boat 1800-T is a high-resolution shallow-water hydrographic unmanned survey vehicle with the newly released Odom Hydrographic Echotrac E20 Singlebeam Echosounder and dual-antenna Trimble BX992 GNSS heading receiver. Each sensor is integrated into a compact, portable package for marine construction and allows data collection under harsh conditions. Both sensors can be removed and mounted on other watercraft and barges.
Teledyne Marine, teledynemarine.com
Trimble, trimble.com
Aerial mapping
Large-format photogrammetry

Photo:
The 280MP Aerial Solution has an image coverage width of more than 20,000 pixels. The large format enables high-quality aerial surveys. Compact and lightweight, the aerial mapping solution consists of an iXM-RS 280F large-format camera, Applanix GNSS/inertial measurement unit (IMU) POS-AV receiver, DSM 400 Somag gyro-stabilized mount, Phase One iX Controller and iX Flight Management software. It is designed for use in a wide range of aircraft.
Phase One Industrial, industrial.phaseone.com
Mobile mapping
Inertial navigation systems

Photo: ixBlue
The Atlans Series of FOG-based inertial navigation systems (INS) is designed for land and air mobile-mapping applications. Based on iXBlue’s fiber-optic gyroscope (FOG) technology, the Atlans Series is a scalable range of north-seeking and north-keeping INS. They provide FOG performance to the full spectrum of land and air mobile-mapping applications and offer highly accurate positioning up to 0.01 meter in all conditions, including within GNSS-denied environments such as urban canyons, mountainous or forested areas.
iXBlue, www.ixblue.com
Census data
2020 neighborhood blocks available

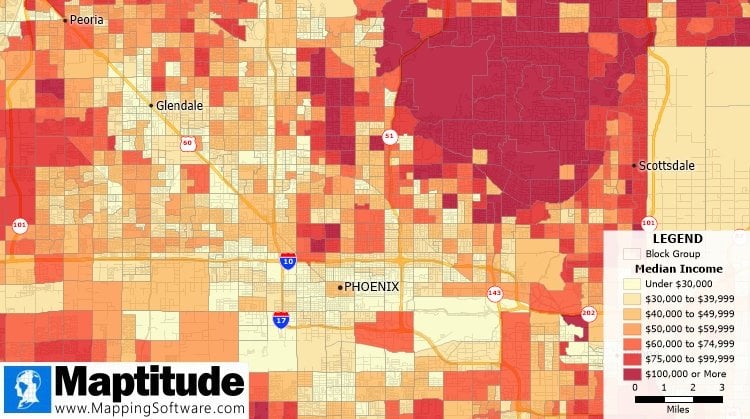
Image: Caliper
The Maptitude 2020 U.S. Census Blocks Groups data is now available for the United States. The small-area Census Summary Level is packed with neighborhood information for making accurate geography-based decisions. Users can explore locations by income, income growth, daytime population, age, race, gender, ethnicity, occupation, housing characteristics and more. The data can be leveraged by data scientists and market research analysts using the Maptitude application. The files are also available as shapefile, KML, KMZ or GeoJSON.
Caliper, www.caliper.com
OEM
GNSS/INS module
Compact system for accurate position, velocity and attitude

Landmark 60 GNSS/INS. (Photo: Gladiator Technologies)
The high-performance LandMark 60 INS/GPS and compact LandMark 005 INS/GPS both feature advanced sensor-fusion technology, combining a 72-channel GNSS receiver with low-noise, high-output inertial sensors as well as barometric pressure and magnetometers. Both products use proprietary Velox processing technology and an extended Kalman filter (EKF), enabling precision position information during short-term GPS outages. The units provide accuracy of less than 2 nautical miles per hour during short-term GPS outages. The LandMark 60 provides +/– 0.3° heading accuracy and pitch/roll angle measurements of 0.1°. It is also available with an option for a real-time kinematic (RTK) GPS receiver. The LandMark 005 is less than 35 square centimeters, suitable for space-constrained applications that require a high standard of performance. Applications include flight control, navigation and stabilization for imaging, platforms and antennas. A development kit is available for set-up, configuration and data collection.
Gladiator Technologies, gladiatortechnologies.com
Crystal oscillators
GNSS-disciplined, oven-controlled

Photo: IQD
The IQCM-112 series of GNSS-disciplined oven-controlled crystal oscillators (OCXOs) incorporates an internal GNSS receiver with a 1-PPS output, which is compatible with an external GPS, GLONASS, BeiDou and Galileo source. It is housed in a 14-pin 60-millimeter-square package. When coupled to an external aerial antenna via the incorporated SMA connector, in the event of the loss of the GNSS signal the highly specified 10-MHz OCXO will switch in with a holdover capability of 1.5 µseconds for a 24-hour period, thereby maintaining lock until restoration of the reference signal. The standard operating temperature range of the module is –20° to 75° C, but it is also available with a –40° to 85° C operating temperature range. Other holdover specifications can be considered upon request.
IQD, iqdfrequencyproducts.com
Triple-band antenna
Embedded helical GNSS

Photo: Tallysman
The HC977 covers GPS/QZSS-L1/L2/L5, GLONASS-G1/G3, Galileo-E1/E5a/E5b, BeiDou-B1/B2/B2a, IRNSS-L5 and L-Band correction services, as well as GLONASS-G2. Tallysman helical antennas are designed for high-accuracy applications where precision and light weight matter, such as unmanned aerial vehicles. The antennas are available in either a robust IP67 enclosure or an embedded format. The HC977 features a low current, low noise amplifier (LNA) that includes an integrated low-loss pre-filter to protect against harmonic interference from high amplitude interfering signals, such as 700-MHz band LTE and other near in-band cellular signals.
Tallysman, tallysman.com
GNSS module
Designed for internet of things

Photo: Quectel
The RG500Q is a series of 5G sub-6-GHz modules optimized for internet of things (IoT) and machine-to-machine (M2M) applications. It supports the Qualcomm IZat location technology Gen9C Lite (GPS, GLONASS, BeiDou/Compass, Galileo and QZSS). The integrated GNSS receiver greatly simplifies product design and provides quick, accurate and dependable positioning capability. The RG500Q is provided in two variants: RG500Q-EA and RG500Q-NA. The RG500Q-EA 5G NR module has achieved commercial readiness and is now available to support global customers with mass deployment.
Quectel Wireless Solutions, quectel.com
UAV
Dual-payload uav
Cost effective for a range of missions

Photo: UMS Skeldar
The V-150 is optimized for use from small naval vessels. It can be employed to support the homeland security, oil and gas and energy sectors. The UAV, which is free from International Traffic in Arms Regulations (ITAR) restrictions, incorporates two payload bays: up to 30 kilograms (kg) in the main bay and up to 12 kg in the nose. Within these, it provides a variety of payload options, including powerful electro optical and infrared (EO/IR) sensors, hyperspectral and multispectral cameras for airborne remote sensing, lidar and a variety of small tactical synthetic aperture radars (SAR) for delivering real-time intelligence in all weather conditions.
UMS Skeldar, umsskeldar.aero
UAV engines
Designed on modular concept

Photo: Sky Power
The SP-56 series is a family of small two-cylinder engines for UAVs. It can be integrated into small helicopters, which require smoother engine operation than single cylinders can provide. The SP-56 series provides 3.35 KW at 7,000 rpm; total weight of the carbureted version is 2.6 kilograms. The engine can be equipped with a generator or a starter generator on the rear output shaft. Hybrid applications are possible in which the engines are used only to generate electricity.
Sky Power, www.skypower.online
2-in-1 UAS System
Rucksack portable for ISR data collection

Photo: Auterion
Two new small unmanned aerial systems (sUAS) are available to U.S. government defense and security markets. Vector and Scorpion form a 2-in-1 rucksack-portable system with an open source operating system, Auterion OS. The Scorpion tricopter can be used for dynamic urban environments and missions that require maneuverability and hover to collect intelligence, surveillance and reconnaissance (ISR) data. A tethering system enables 24/7 operations. By configuring the base fuselage with fixed wings and tail section, Scorpion transforms into Vector, a fixed-wing vertical takeoff and landing (VTOL) UAV for long-range, long-endurance ISR missions.
Auterion Government Solutions, auterion-gs.com
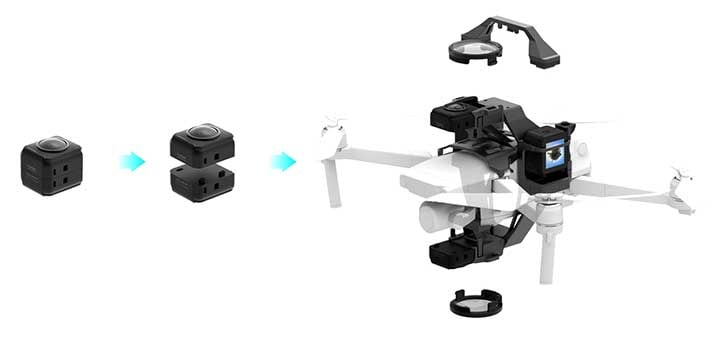
Action camera
Interchangeable lenses increase options

Photo: Insta360
Insta360 ONE R is an interchangeable-lens action camera designed with three swappable Lens Mods for capturing different kinds of content. It has a Dual-Lens 360 Mod and a 1-Inch Wide Angle Mod co-engineered with Leica Camera AG. Advanced stabilization with Insta360’s FlowState algorithm achieves gimbal-like stabilization when shooting 360 degrees or with a standard wide angle lens. The 5.3K wide-angle lens can be swapped for a dual-lens setup that captures action in all directions at once. It captures brilliant 5.3K video and 19-megapixel photos even in complex lighting conditions. The ONE R is waterproof to 5 meters.
Insta360, insta360.com
Gilla detta:
Gilla Laddar in …




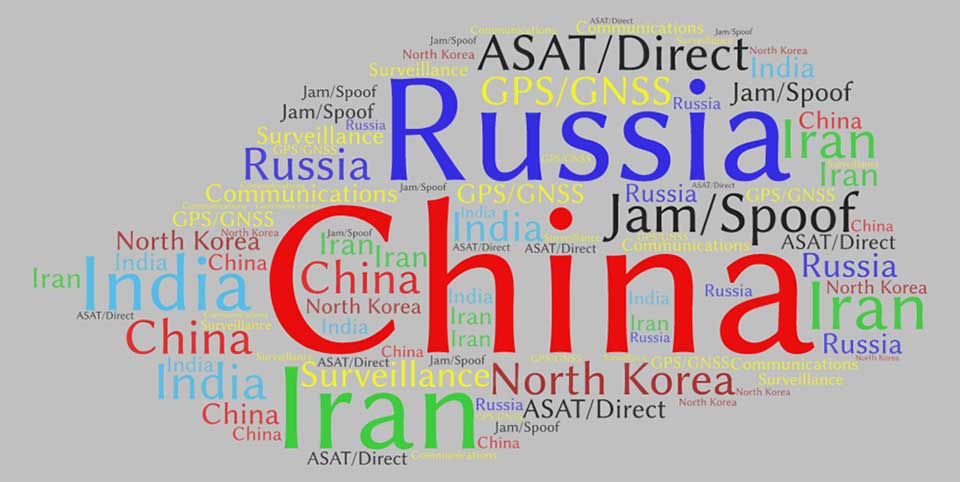 This word cloud from CSIS Space Threat Assessment 2020 shows that China received by far the most mentions, followed by Russia. (Image: RNT Foundation)
This word cloud from CSIS Space Threat Assessment 2020 shows that China received by far the most mentions, followed by Russia. (Image: RNT Foundation)